
| Конструкция | Информация | Расчеты | Литература | Гостевая | ||
| Конструкция вагона | |
|
|
Кузов |
|
|
Тележки |
|
|
|
|
|
Тормоз |
|
|
Изоляция |
| Статьи | |
|
|
Депо для высокоскоростных поездов |
|
|
Теория по динамике вагонов |
| Расчёты | |
|
|
Надежность |
|
|
Расчет кузова на прочность |
|
|
Расчет ходовых частей |
|
|
|
Депо для высокоскоростных поездов |
|||||||||||||||
|
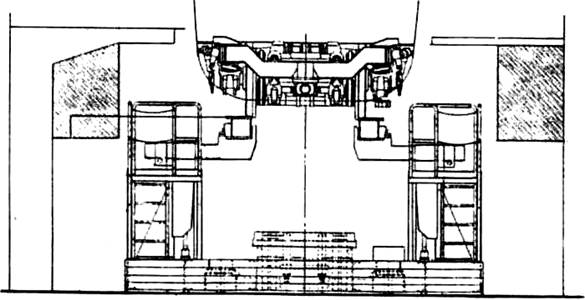
Всего предусмотрено шесть устройств
RSW и два устройства для замены моторных тележек (DWG). В каждой
зоне монтажно-демонтажных работ с целью снабжения этих устройств
энергией (сжатый воздух под давлением 10 бар, электрический ток
380/220 В) имеется соответствующая арматура. Вследствие большого
объема монтажных работ моторную тележку нельзя заменить в течение,
одного часа. Поэтому такая замена возможна только при текущем ремонте
продолжительностью 8ч.
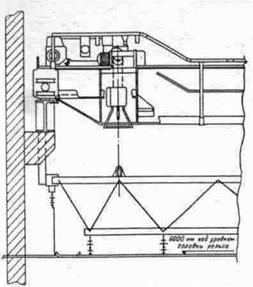
До сих пор работы на тележках и экипажной части подвижного состава производятся из смотровой ямы, а также на уровне пола цеха. По концепции обслуживания и ремонта высокоскоростного поезда ICE с жесткими временными параметрами необходимы специальные подвижные средства с автономным приводом и регулированием высоты рабочих площадок (AHW). Предусмотрено, что два AHW должны перемещаться вдоль поезда по обеим сторонам, а третье - под ним, между стойками рельсового пути (рис. 6). В процессе осмотра при обнаружении значимых повреждений с AHW по имеющейся радиосвязи сообщается идущим вслед рабочим или очередному AHW, который оснащен специальными приборами.
Исходя из условий техники безопасности
предусмотрены следующие размеры: промежутки между AHW и стойками
рельсового пути - до 300 мм, расстояние от AHW до колонн цеха -
1200 мм, до колеи и обгонных участков AHW - по 1000 мм. Эти требования
в состоянии выполнить только транспортная система с принудительным
управлением и регулируемой высотой рабочих площадок, включающая
перемещающиеся около поезда и между стоек рельсового
пути транспортно-технологические устройства AHW.
Процесс управления перемещениями
базируется на принципе гибкого программирования. Задание параметров
движения осуществляется с пульта управления. Автоматический контроль
коммутационных цепей предусматривает индикацию повреждений в наглядной
форме (текстовую), что способствует оперативности их устранения.
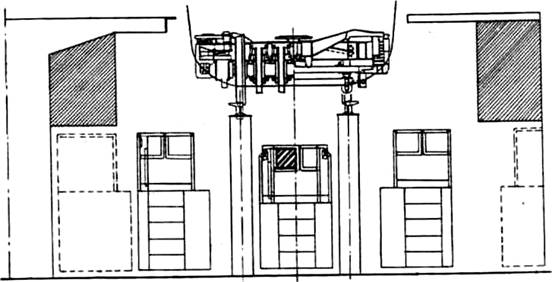
Если колесная пара на диагностическом
стенде отмечена как дефектная, необходимо еще раз проверить, допустим
ли дефект по условиям безопасности. В случае выхода из строя стенда
диагностики необходимо проверять колесные пары на наличие дефектов
на поверхностях катания. Для этих целей фирмой ГЕДИ разработан агрегат
RDG, который позволяет в позиции под рельсовыми мостками прокручивать
колесную пару со скоростью, соответствующей условиям визуального
контроля.
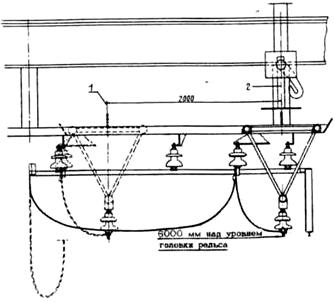
Система "мостовой кран с фермой для контактного провода" разработана фирмами ИННОТЕК (Гамбург) и АУМ7НД (Рейнберг). От стандартного исполнения эту систему отличает ряд особенностей. Кроме расположенного рядом с ходовой тележкой основного подъемного механизма с грузоподъемностью 2000 кг и расстоянием перемещения крюка до 11м, на несущих балках мостового крана смонтировано по одному специальному подъемнику грузоподъемностью по 1000 кг с длиной перемещения крика 9 м. Они объединены с автоматически работающим средством захвата груза (автоматический крюк крана), расположенным на верхнем поясе треугольной решетчатой фермы для контактного провода.
На рис.8 показаны несущая ферма
для контактного провода с токоведущей шиной, консоль для смещения
от середины пути (ниже подкранового пути) и специальный подъемник
с грузозахватным устройством и автоматическим крюком крана. Предпосылкой
безупречного функционирования системы автоматизированного поперечного
перемещения фермы с контактным проводом является требование абсолютно
одинакового хода тележек крана. Выполнение этого требования обеспечивается
наличием калиброванных цепей вдоль каждого подкранового рельса и
датчиков скорости вращения с высокой разрешающей способностью. Автоматическое
перемещение фермы с контактным проводом в заданную позицию реализуется
с использованием электропривода постоянного тока с микропроцессорным
управлением. |
|||||||||||||||
| Главная | Конструкция | Информация | Расчеты | Литература | Гостевая | |